在工業控制計算機及系統制造領域,實時、精確的時鐘控制是保障系統穩定運行、實現高精度同步與協調的關鍵。RCC(Real-Time Clock Controller,實時時鐘控制器)時鐘控制系統在其中扮演著核心角色。本文將深入解析RCC時鐘控制系統的組成,并對其時鐘原程序進行技術分析。
一、RCC時鐘控制系統組成
RCC時鐘控制系統是一個軟硬件結合的精密體系,主要包含以下幾個核心組成部分:
- 硬件基礎:時鐘源與振蕩器
- 主時鐘源:通常由外部高速晶體振蕩器提供,作為系統主時鐘的基準,頻率通常在8MHz至25MHz之間,為CPU核心及高速外設提供時鐘。
- 內部時鐘源:包括內部高速RC振蕩器和低速RC振蕩器。前者作為主時鐘源的備份或系統啟動時的初始時鐘;后者主要驅動獨立看門狗和實時時鐘模塊,功耗極低。
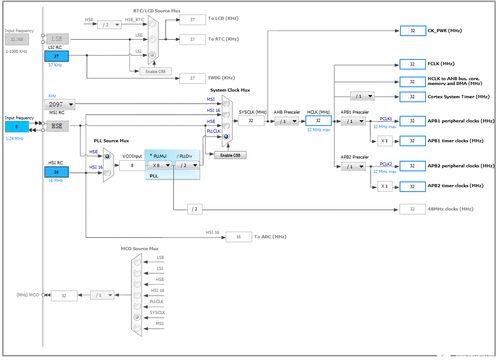
- 鎖相環:用于對原始時鐘信號進行倍頻或分頻,生成系統所需的各種高頻時鐘信號,是提升系統運行速度的關鍵部件。
- 核心控制單元:RCC控制器
- 這是集成在工業控制計算機主控芯片(如基于ARM Cortex-M系列的MCU)內部的專用電路模塊。它負責所有時鐘源的開關、選擇、分頻/倍頻配置,并將生成的時鐘信號分配到系統的各個總線(如AHB、APB1、APB2)及外設(如GPIO、定時器、串口、ADC等)。
- 時鐘分配與使能網絡
- 這是一個由多路選擇器、分頻器和門控電路構成的網絡。它根據RCC控制器的配置,將處理后的時鐘信號精確送達目標模塊。每個外設通常都有一個獨立的時鐘使能位,允許軟件獨立控制其時鐘通斷,以實現精細的功耗管理。
- 實時時鐘模塊
- 一個獨立的、由低速振蕩器(外部32.768kHz晶振或內部低速RC)供電的計時單元。即使主系統斷電,在備份電池的支持下,RTC也能持續運行,為工業系統提供精確的日歷、時間戳和定時喚醒功能。
- 軟件驅動與配置接口
- 由芯片廠商提供的固件庫或硬件抽象層代碼構成,為上層應用程序提供配置RCC的API函數。這是程序員與RCC硬件交互的主要橋梁。
二、時鐘原程序分析(以典型ARM Cortex-M環境為例)
時鐘原程序通常指系統啟動階段初始化時鐘系統的底層代碼(如SystemInit()函數),其核心目標是穩定、快速地建立整個系統運行的時鐘樹。分析其關鍵流程如下:
- 復位后狀態:系統上電復位后,默認使用內部高速RC振蕩器作為系統時鐘,此時系統運行在較低頻率(如8MHz),以確保最基本的啟動操作。
- 使能外部時鐘:程序首先使能外部高速晶體振蕩器的硬件電路,并等待其起振穩定(通過檢測相關標志位)。此過程包含延時等待,以確保時鐘信號可靠。
- 配置鎖相環:程序配置PLL的時鐘來源(通常選擇穩定的外部晶振)、倍頻系數和分頻系數,以計算出目標系統時鐘頻率(如72MHz、168MHz等)。然后使能PLL并等待其鎖定。
- 切換系統時鐘源:將系統時鐘源從內部的RC振蕩器切換到已鎖定的PLL輸出。至此,CPU及高速總線運行在設定的高性能頻率上。
- 配置總線與外圍時鐘:根據應用需求,對AHB、APB1、APB2等總線進行預分頻配置,并逐個使能將要使用的外設時鐘。此步驟實現了時鐘樹的精細化管理,未使用的外設時鐘被關閉以節省功耗。
- 實時時鐘配置:如果需要,程序會初始化RTC模塊,選擇其時鐘源(外部低速晶振精度更高),并配置日歷和時間。
程序特點與工業考量:
穩健性:代碼包含大量狀態檢查和超時處理,防止因時鐘源失效導致系統死鎖。
可配置性:通過宏定義或配置表,可以靈活適配不同頻率的晶振和系統性能需求。
原子性:關鍵的時鐘切換操作通常是原子的或受保護序列的,以避免切換過程中產生毛刺。
低功耗設計:時鐘的使能/禁用邏輯是工業控制系統實現動態功耗管理的基礎。
###
RCC時鐘控制系統是工業控制計算機的“心跳”發生器。其硬件組成的精密性與軟件原程序的可靠性,共同決定了整個工控系統的實時性、同步精度和能效水平。深入理解其組成與初始化流程,對于進行工控系統底層開發、性能優化以及故障診斷都具有重要意義。在工業4.0和智能制造背景下,對高精度時間同步(如IEEE 1588協議)的需求日益增長,這使得RCC時鐘系統的設計與分析變得愈發關鍵。